|
|
| Zeile 21: |
Zeile 21: |
| | | | |
| | === I2C Objekt erzeugen=== | | === I2C Objekt erzeugen=== |
| − | | + | Wie alles in Micropython ist auch I2C als Klasse implementiert. Deshalb muß für jeden I2C Bus eine Instabz erzeugt werden. |
| | + | <br> |
| | + | Micropython kennt 2 Arten von I2C Treibern. Einmal den Hardware I2C Treiber und die Software Implementierung. |
| | + | <br> |
| | + | ==== Hardware I2C==== |
| | + | Der Raspberry Pi Pico W enthält 2 Hardware I2C Einheiten (0 und 1). |
| | <pre> | | <pre> |
| | from machine import Pin, I2C | | from machine import Pin, I2C |
| | | | |
| − | i2c = I2C(0) # default assignment: scl=Pin(9), sda=Pin(8) | + | i2c = I2C(0) # default assignment: scl=Pin(9), sda=Pin(8) |
| | i2c = I2C(1, scl=Pin(3), sda=Pin(2), freq=400_000) | | i2c = I2C(1, scl=Pin(3), sda=Pin(2), freq=400_000) |
| | | | |
Version vom 11. Dezember 2023, 15:25 Uhr
Das Protokoll
Das I2C Manual kann von hier heruntergeladen werden.
Der Bus
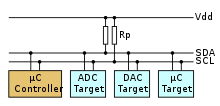
Der I2C Bus besteht aus 2 Leitungen, SCL uns SDA. SCL ist die Taktleitung (clock) und SDA die Datenleitung. Die I2C Geräte werden paralell an den Bus angeschlossen. Beide Busleitungen müssen mit einem Widerstand an Vcc gelegt werden.
Der maximale Ausgangsstrom eines I2C IC's beträgt mindestens 3 mA. Der maximale Eingangsstrom 10 µA. Die Widerstände Rp müssen so gewählt werden, das der maximale Strom von 3 mA nicht überschritten wird.
Der I2C Bus ist ein Master/Slave System. Der Master bestimmt, was auf dem Bus geschieht. Er gibt den Takt vor und adressiert die Clients. Ein Client kann nur aktiv werden, wenn der Master ihn dazu auffordert. Deshalb haben I2C IC's häufig Interrupt Ausgänge mit denen dem Master mitgeteilt werden kann, dass Daten zum Abholen bereit stehen.
Die Datenübertragung
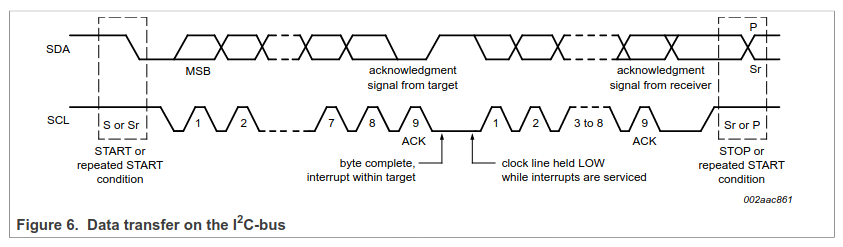
Die Übertragung erfolgt in Dateneinheiten. Eine Dateneinheit besteht aus 8 Datenbits und einem ACK-Bit. Dabei wird zuerst das MSB (most significant bit) also Bit 7 übertragen.
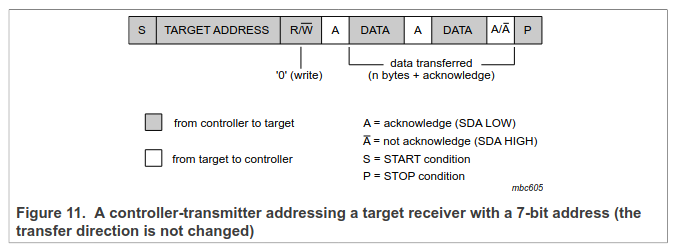
Die erste Dateneinheit enthält die Zieladresse (7 Bit) und das R/W-Flag. Die weiteren Dateneinheiten enthalten die zu übertragenen Daten. Mit dem ACK-Flag kann der Client die weitere Übertragung verzögern, um genügend Zeit für die Verarbeitung der Daten zu haben.
I2C Objekt erzeugen
Wie alles in Micropython ist auch I2C als Klasse implementiert. Deshalb muß für jeden I2C Bus eine Instabz erzeugt werden.
Micropython kennt 2 Arten von I2C Treibern. Einmal den Hardware I2C Treiber und die Software Implementierung.
Hardware I2C
Der Raspberry Pi Pico W enthält 2 Hardware I2C Einheiten (0 und 1).
from machine import Pin, I2C
i2c = I2C(0) # default assignment: scl=Pin(9), sda=Pin(8)
i2c = I2C(1, scl=Pin(3), sda=Pin(2), freq=400_000)
i2c.scan() # scan for peripherals, returning a list of 7-bit addresses
i2c.writeto(42, b'123') # write 3 bytes to peripheral with 7-bit address 42
i2c.readfrom(42, 4) # read 4 bytes from peripheral with 7-bit address 42
i2c.readfrom_mem(42, 8, 3) # read 3 bytes from memory of peripheral 42,
# starting at memory-address 8 in the peripheral
i2c.writeto_mem(42, 2, b'\x10') # write 1 byte to memory of peripheral 42
# starting at address 2 in the peripheral
I2C Objekt benutzen
SSD1306 Display mit I2C benutzen
Das SSD1306 IC
SSD1306 Datenblatt



